



生活报8月7日讯 2018年8月6日12时(美国当地时间8月5日),历时7天的第二十一届国际水下机器人大赛在美国圣迭戈落下帷幕。记者从哈尔滨工程大学获悉,哈尔滨工程大学E·唯代表队作为中国唯一参赛队,力克康奈尔大学、加州理工学院等国际顶尖大学代表队斩获冠军,让中国成为该赛事自举办21年以来第一次获得该比赛的冠军,哈尔滨工程大学E·唯代表队也成为第9支获得过冠军的队伍。
八年磨一剑
打破北美院校对冠军的垄断
据悉,国际水下机器人竞赛被誉为水下机器人领域的“世界杯”,历届比赛汇集了美国伍兹霍尔研究所、麻省理工学院、新加坡国立大学等世界顶级研究机构及高校。代表哈工程参赛的E·唯协会成立于2001年,隶属于信息与通信工程学院,从2005年开始研究水下机器人,并从2011年正式开始参加国际水下机器人竞赛,2017年获得全球第四名。此次赴美由刘文智、李海波、叶秀芬三位老师和周翰文、王潇洋、刘红、候俊、黄杰、孙祥仁、陈尚泽、吴建锋8名同学组成了HEU战队,并在长达一年的准备时间中重新制作了全新的水下机器人-敖明2号。
记者从哈尔滨工程大学了解到,经过激烈的角逐,哈工程第一天的半决赛取得了任务总分近14000分的好成绩,以领先第二名新加坡代表队近10000分的成绩领跑成绩榜。最终有6支队伍从47支队伍中脱颖而出进入决赛。美国时间下午13时,决赛终于开始,首先出场的是圣迭戈和俄罗斯的战队,之后,HEU战队的同学们出色地完成了规定动作,最终战胜了新加坡国立队,取得了比赛的第一名。此前历届冠军,皆为北美顶级研究所或高校团队,哈工程的团队终于打破垄断,创造纪录。
提高比赛效率研制杀手锏“机器手”一次能抓4个球
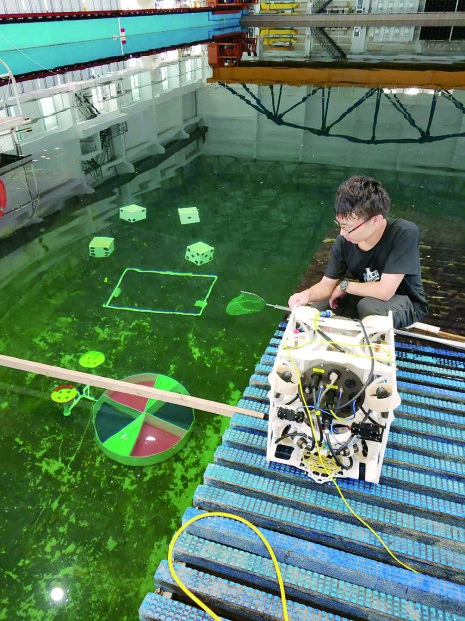
本届比赛的主题为水下赌城,要求机器人能在水下自主完成投币出发、自主巡线、识别骰子、抓取目标物、水声定位等任务。需要左右上下移动,且需要抓取目标物,这就意味着需要机器手,因此,团队重新设计了像没壳小冰箱的敖明2号。
哈工程船舶工程学院大三的孙祥仁是“小明”的设计师之一,记者曾在他们参赛前,在哈工程实验室看到“小明”,它的前脸有两个双摄像头,“脑门”两侧和“前腿”都有螺旋桨。孙祥仁说,这样的动力推进器“后背”还有两个,这样“小明”在水下就可以上下左右游动,哪怕是被“绊倒”也能起来。而且“小明”肚子下藏有秘密武器,此次比赛最后环节需要机器人抓取四个彩色小球放入红色漏斗,“如果一次只抓一个,很浪费时间。”当时,自动化学院大二的侯俊告诉记者,团队想出了一个“贪心”的主意——一次抓四个球,研究出了“圆梳机器手”,时间效率提高了,成为赢得比赛的杀手锏。
摆正设备到处捡球为了更好地测试设计了助理机器人
世界第一的成绩离不开辛苦的备战和刻苦的钻研。指导老师李海波表示,从外观到部件设置到程序书写,都是成员们一起研究的,最核心的程序往往要写入万余条指令。机器人下水测试经常要从晚8点到早4点,然后第二天11点再集合,成员们基本整天都泡在训练场地。
记者之前走进协会所在的哈工程21号楼A楼,在地下入口处就看到同学们洗漱用的脸盆和衣服,走廊里贴满了获奖照片,室内还有各种车床工具。由于本次参赛的机器人要求必须能装进两个27寸的行李箱,而且单箱不能超过30斤。所以“小明”的体重在各种努力下减了又减,也有58斤,这让实际操作的航建学院大三的刘红直呼“老腰受不了”。
咋解决?他从协会车床上车了四个带凹槽的小轱辘,给“小明”安上。他们又做了一个黑色的“助理机器人”,专门在水下摆正测试设备,到处捡球,记者当时在现场看到只想说,动手能力太强,不要太酷!
未来能大有用处资源勘测、水下捕捞、救援样样行
记者了解到,比赛中机器人一旦入水,就会脱离设计者的控制,完全独立地在规定时间内完成多个科目的比赛,对机器人自主判断和决策能力要求非常高。这意味着大量的人工智能、模式识别、水声定位等技术应用于该水下机器人。自主识别、判断并执行,成为水下机器人今后发展的一个重要方向。
李海波说,“以后水下机器人完全可以代替深潜员,机械手就可以进行海产品的捕捞,发现目标就上浮提示,也可以承担起搜救和救援等活动。”并且积极参加比赛的经验也将反哺知识教育体系,未来多项技术可移植于资源勘探、水下安防等领域,开发海洋、服务国防。



